PnC Research & Development, Baidu Apollo
Summary. My work at Apollo. Baidu has focused on decision-making and planning for autonomous driving, with a particular emphasis on interactions with vulnerable road users (VRUs). Since 2026, I have also been working on learning-based prediction models.
I. Prediction
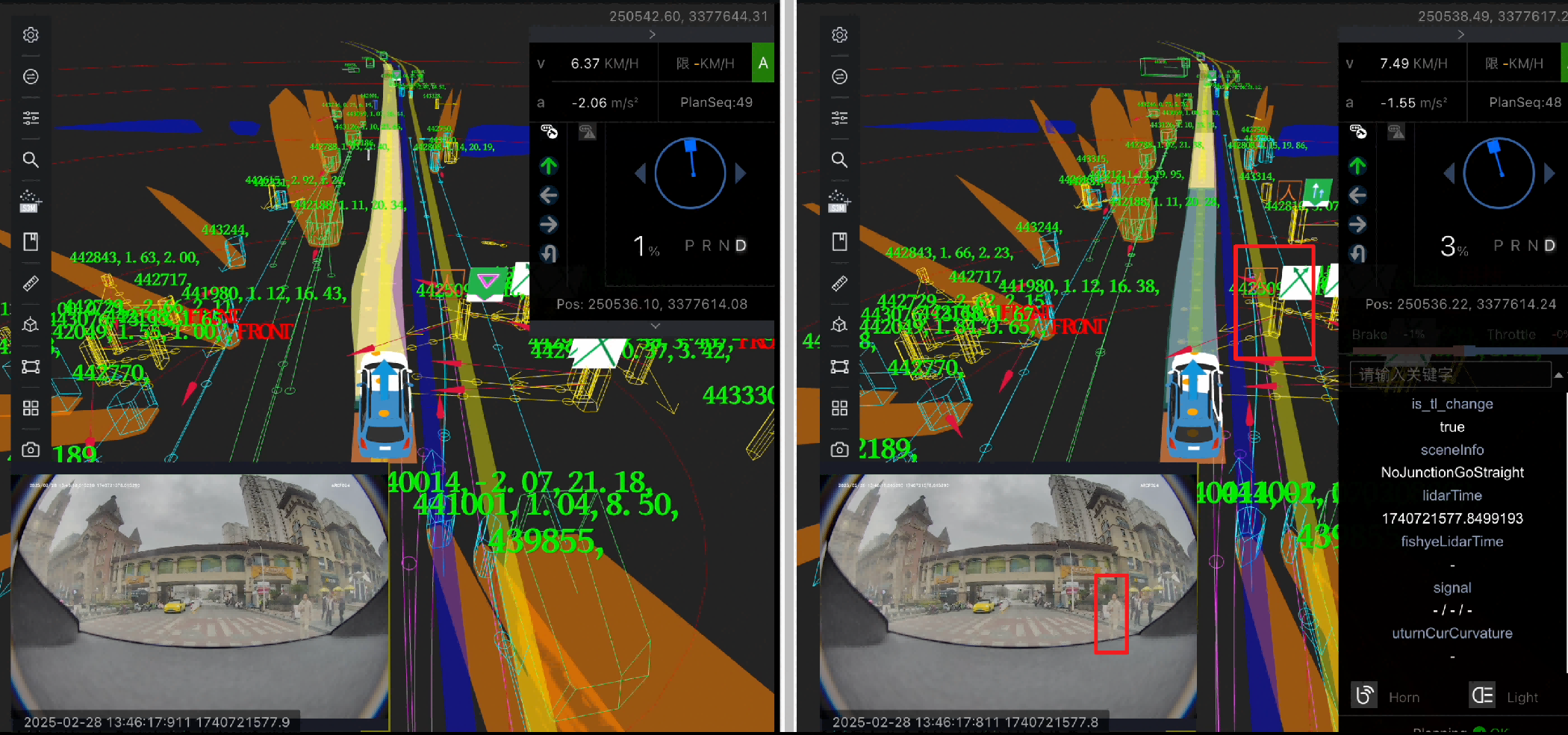
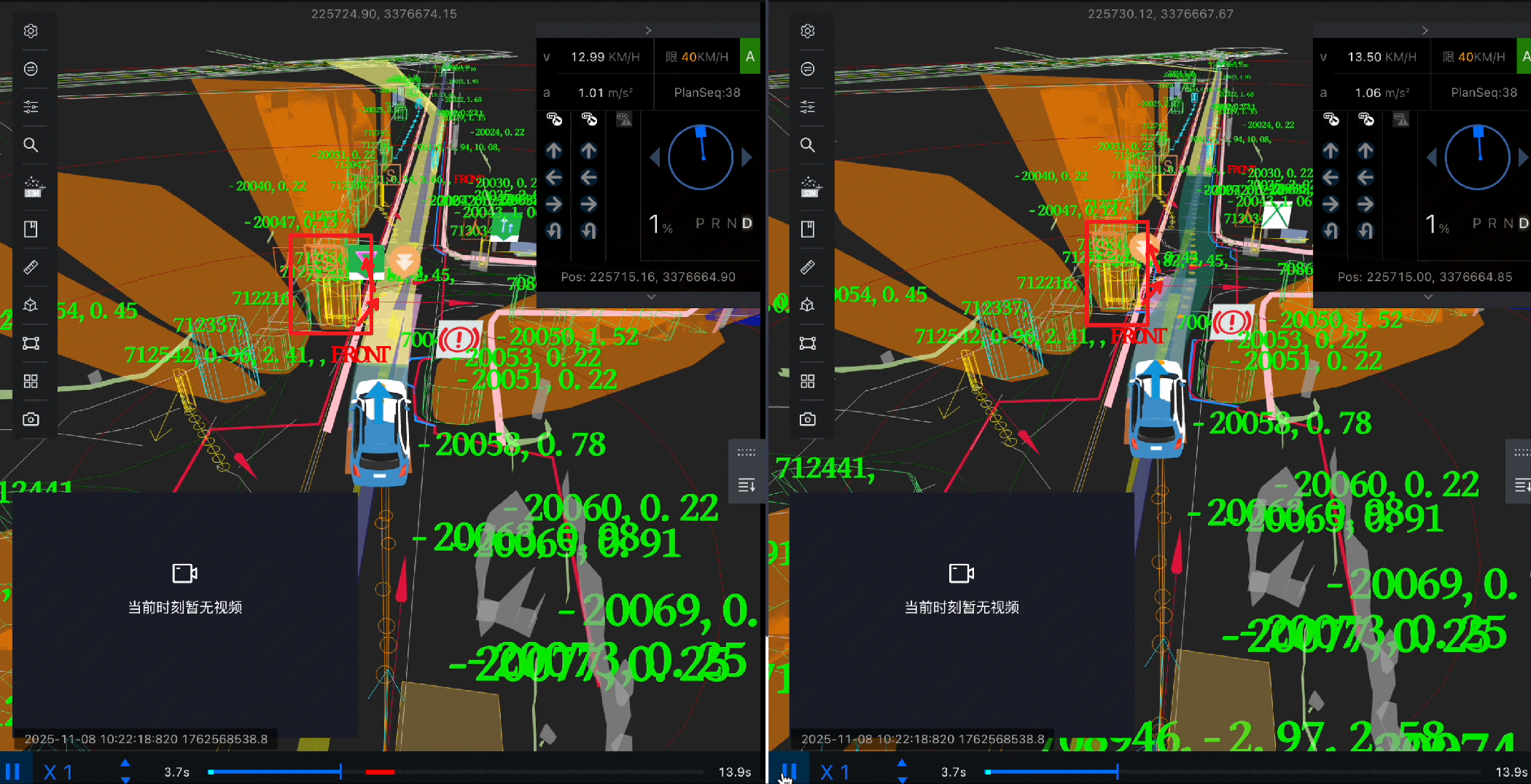
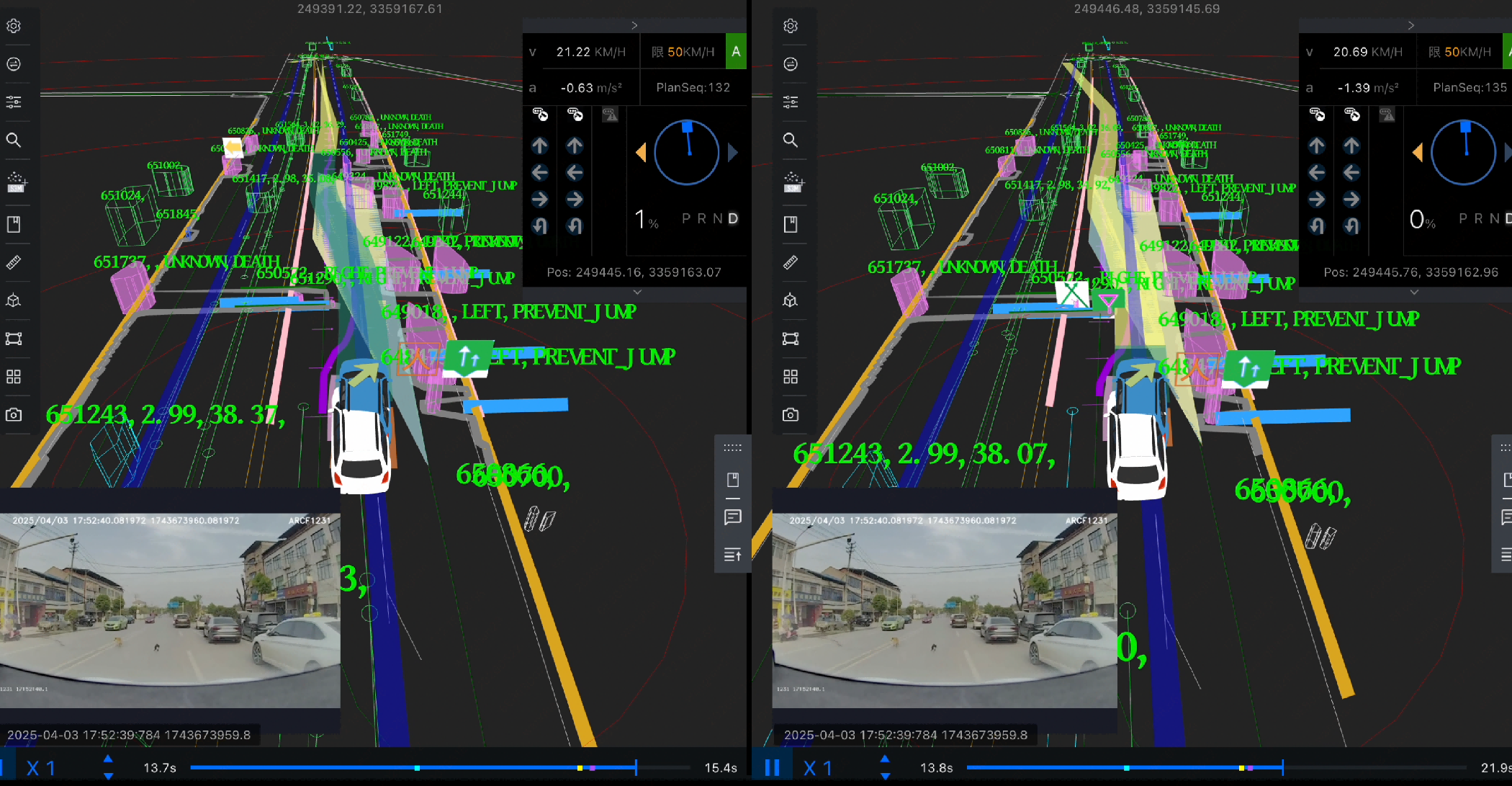
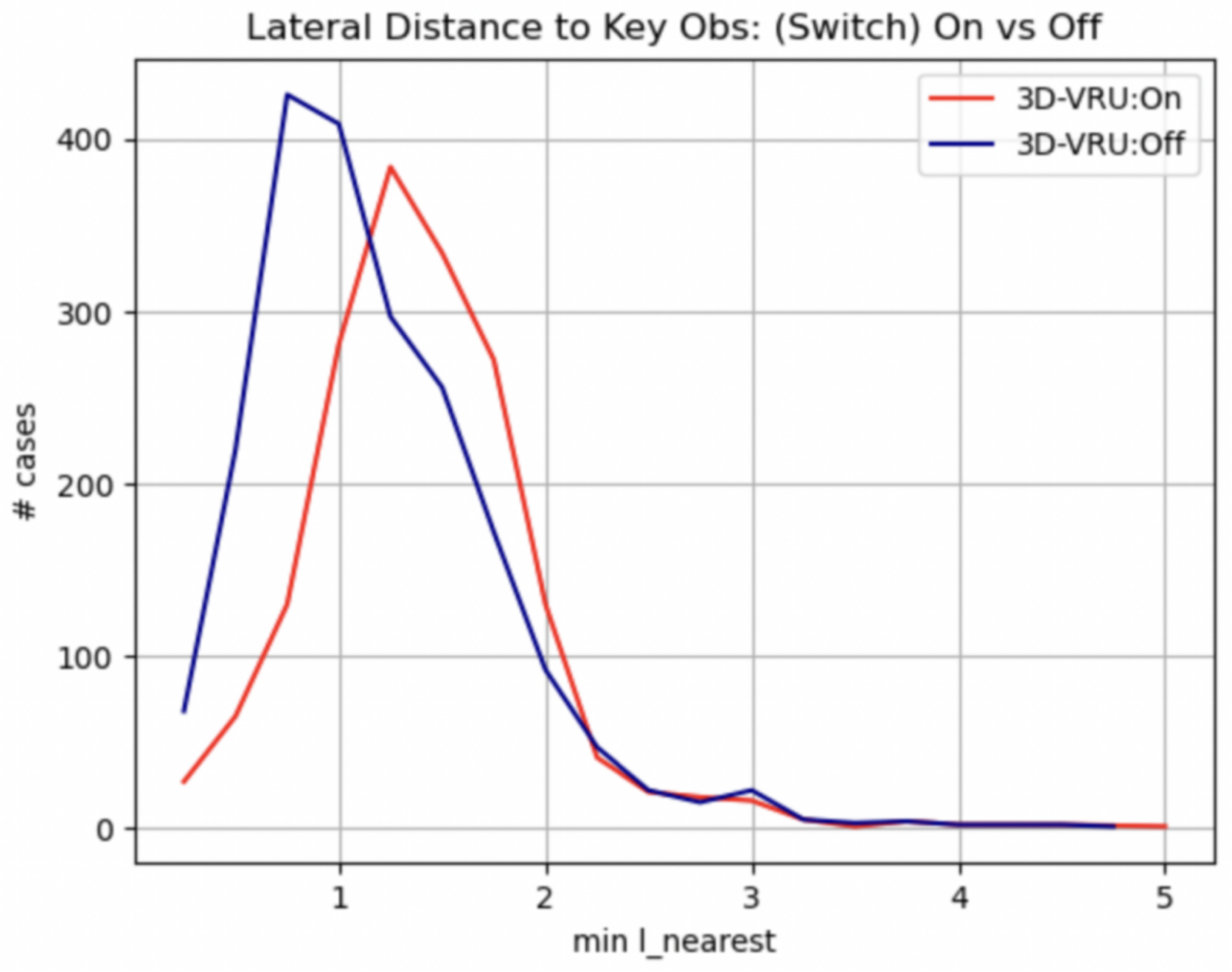
Reinforcement Learning Fine-Tuning for OCC Safety. Fine-tuned trajectory prediction model to reduce unsafe predictions that unrealistically cross occupancy regions (OCC), which may introduce downstream collision risks. Major contributions include (1) Developed a frame-level and obstacle-level data mining pipeline to identify high-value OCC cases and analyzed the theoretical optimization upper bound achievable by trajectory re-ranking. (2) Designed a policy-gradient fine-tuning framework for MTR inspired by GRPO, combining policy gradient, KL regularization and behavior cloning objectives for stable optimization. (3) Developed dense reward functions that consider OCC violations, first OCC crossing time and traveled distance before collision.(4) Introduced an MTR-specific two-stage optimization strategy that first improves trajectory ranking (probability regression) and then trajectory generation (point regression). (5) Built an automated evaluation and visualization framework for Good/Bad case mining and failure analysis. Results (1) Offline evaluation. Vehicle: Top-1 OCC crossing ↓ 8.97%, Top-6 OCC crossing ↓ 18.04%, Top-1 Recall ↓ 0.44%, Top-1 ADE ↑ 1.38%. Cyclist: Top-1 OCC crossing ↓ 6.62%, Top-6 OCC crossing ↓ 13.19%, Top-1 Recall ↑ 0.17%, Top-1 ADE ↑ 0.60%. (2) End-to-end simulation. Reduced OCC-related post-processing fallback activations by 85.10%. Produced more reliable predictions in high-risk interaction scenarios and prevented several potential collision cases.
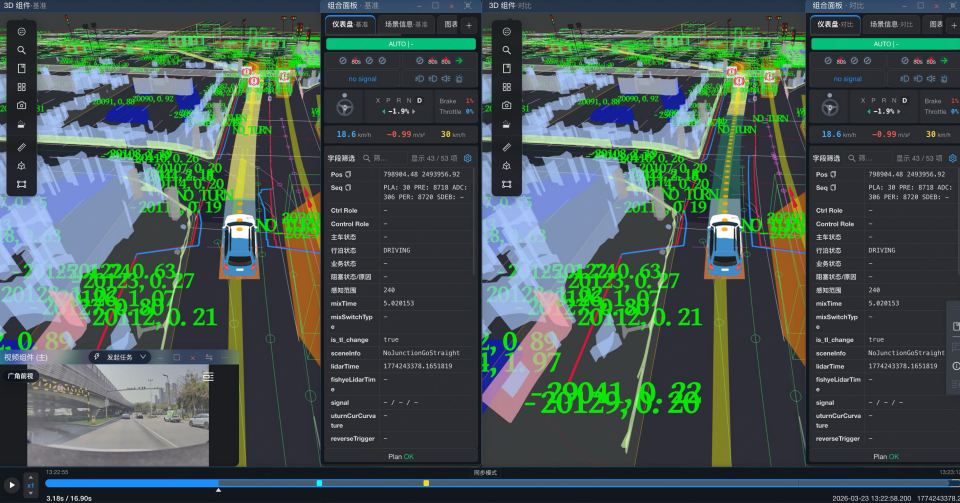
(a) No Unreasonable Cut-in Prediction
|
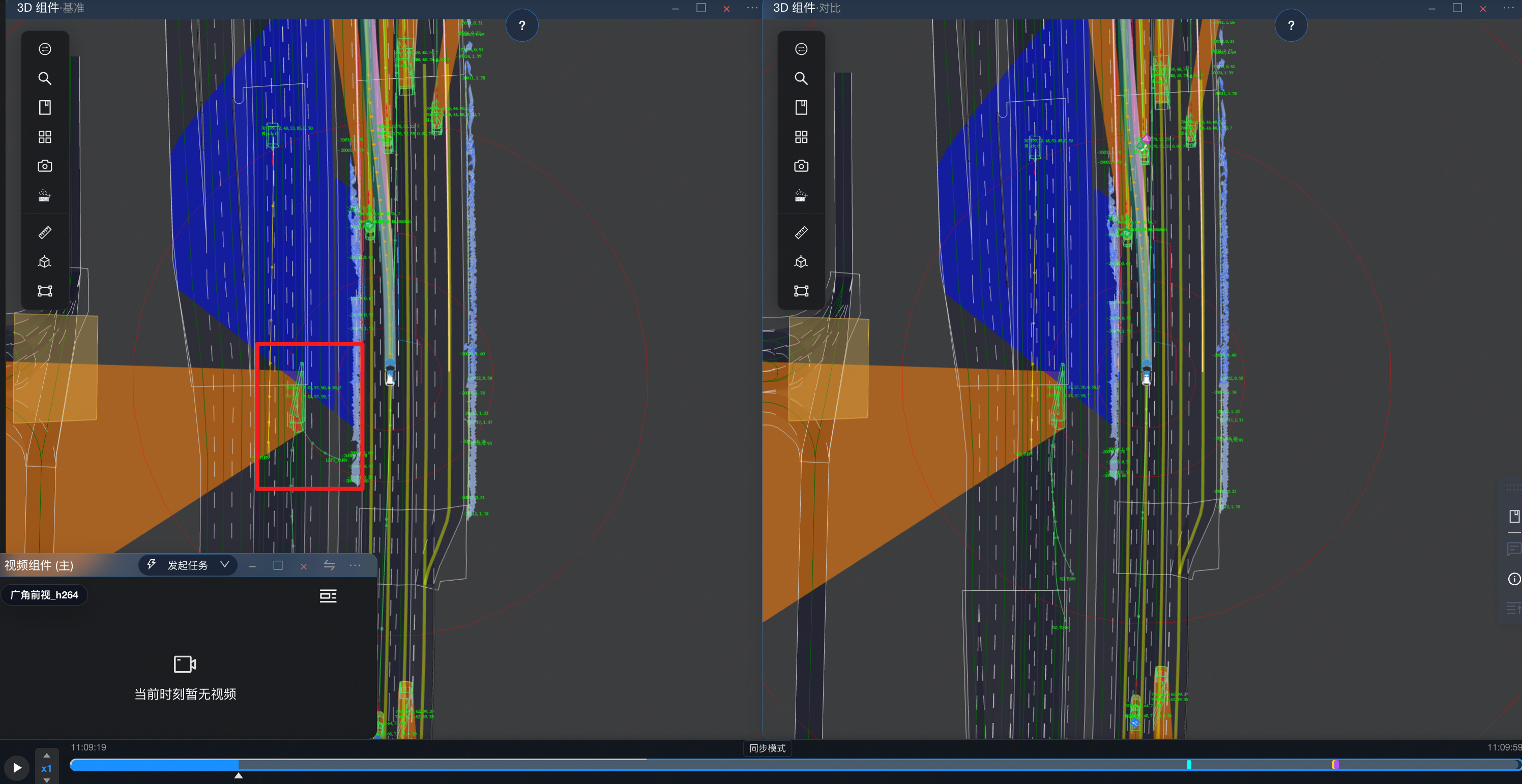
(b) No Unreasonable Prediction
|
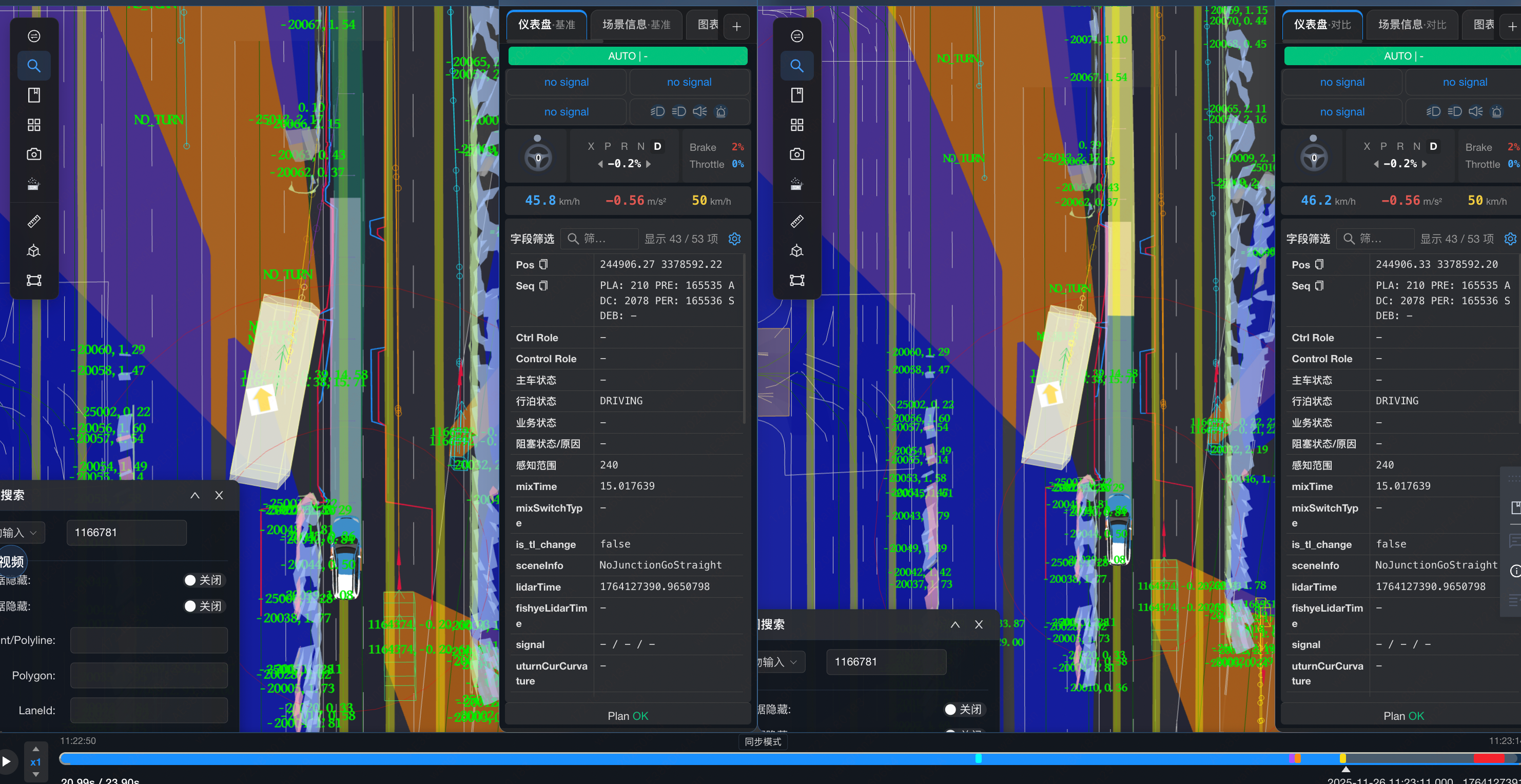
(c) More Precise Cut-in Prediction
|
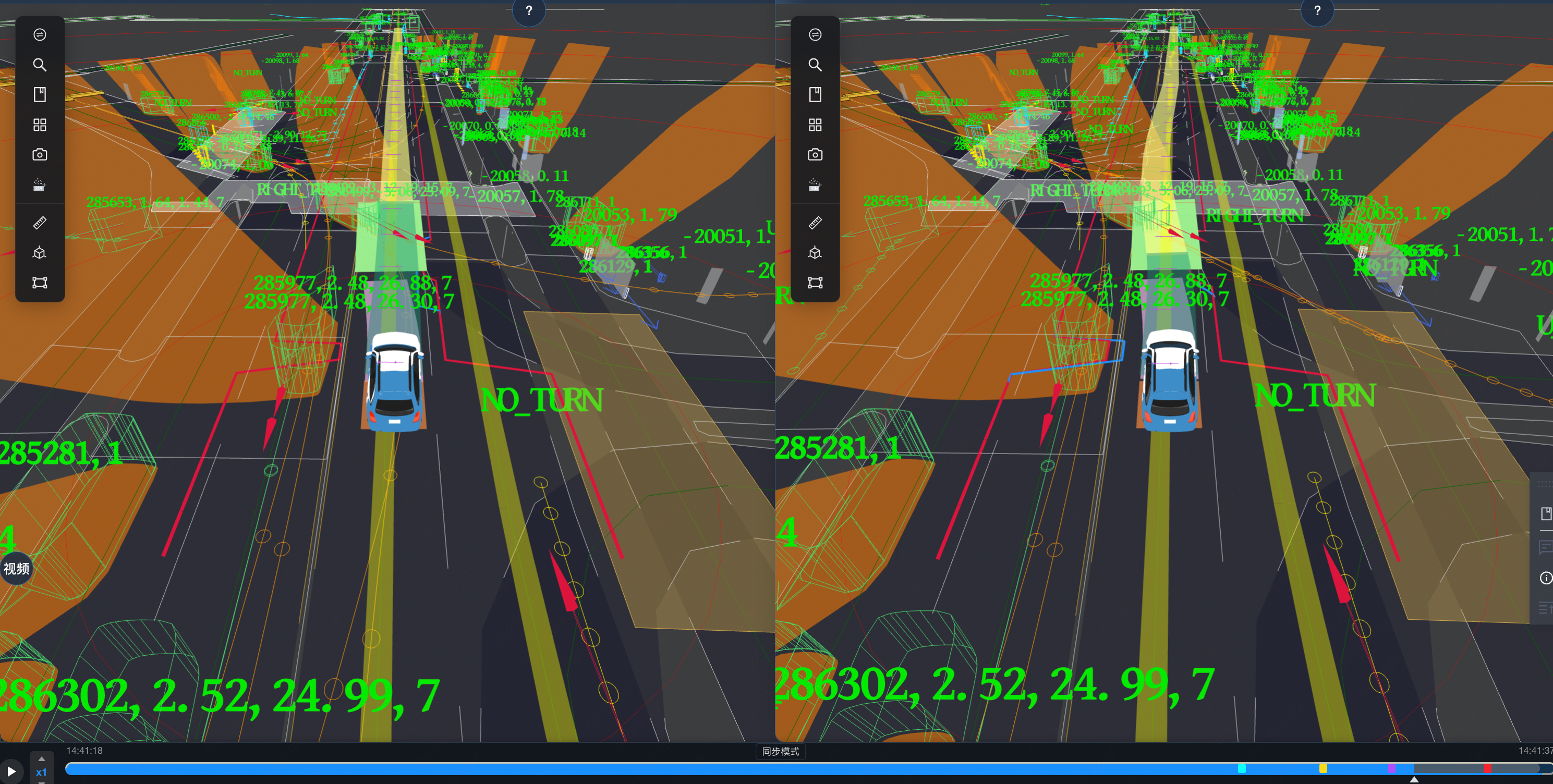
(d) More Precise Cut-out Prediction
|
Figure. 1 Performance Gains from RL Fine-Tuning on OCC-Free(right: the newest version)
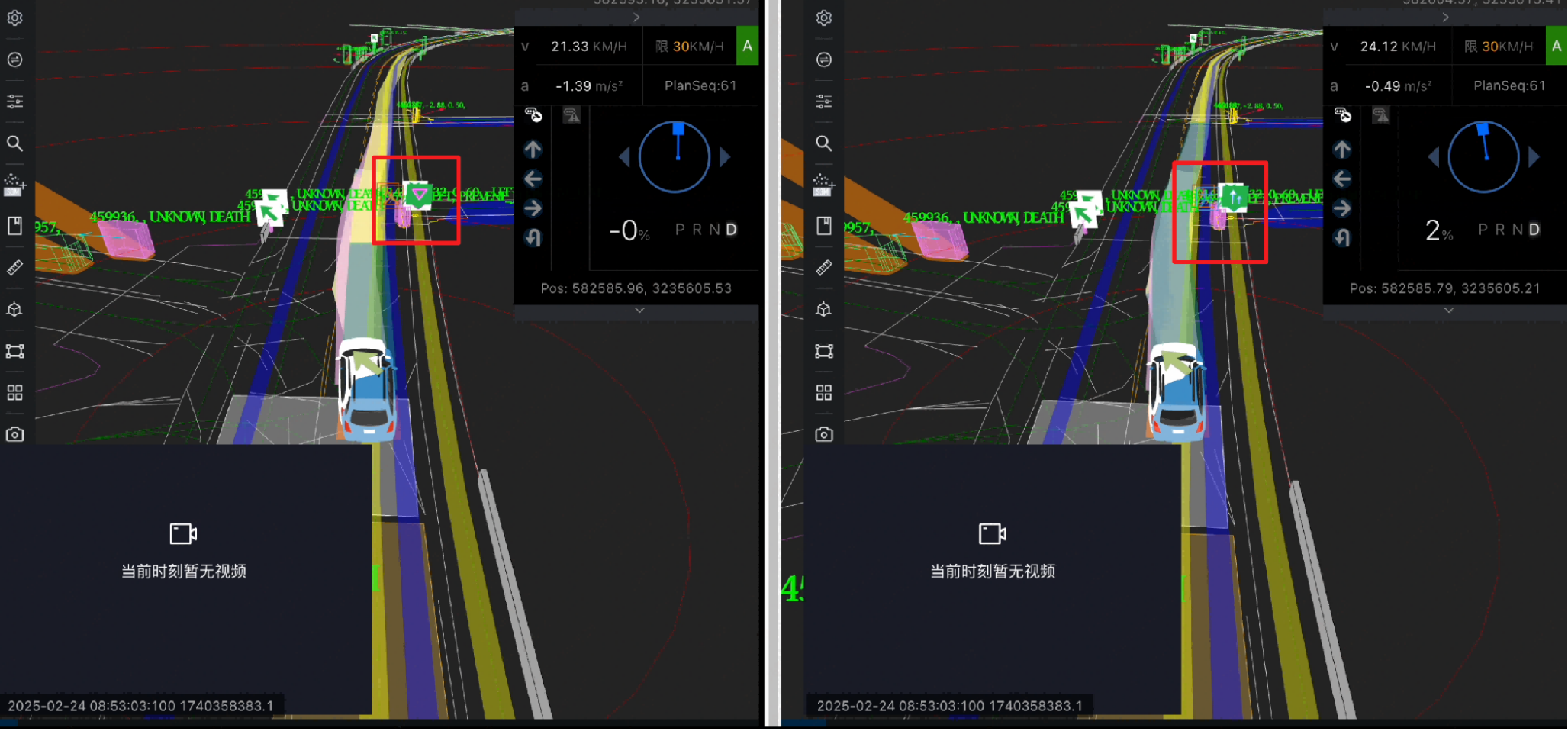
Model Post-Processing and Planning Adaptation. Developed a prediction-planning co-design framework to address rare but safety-critical cut-in scenarios where the prediction model fails to recall the true cut-in trajectory. Major contributions include (1) Retrieved plausible cut-in trajectories from Top-K prediction candidates through post-processing. (2) Forwarded selected trajectories to downstream planning modules for speed limiting and yielding behaviors. Results: Improved more than 60% of high-risk cut-in scenarios in simulation benchmarks (Figure.2 d).
II. Decision Making and Planning
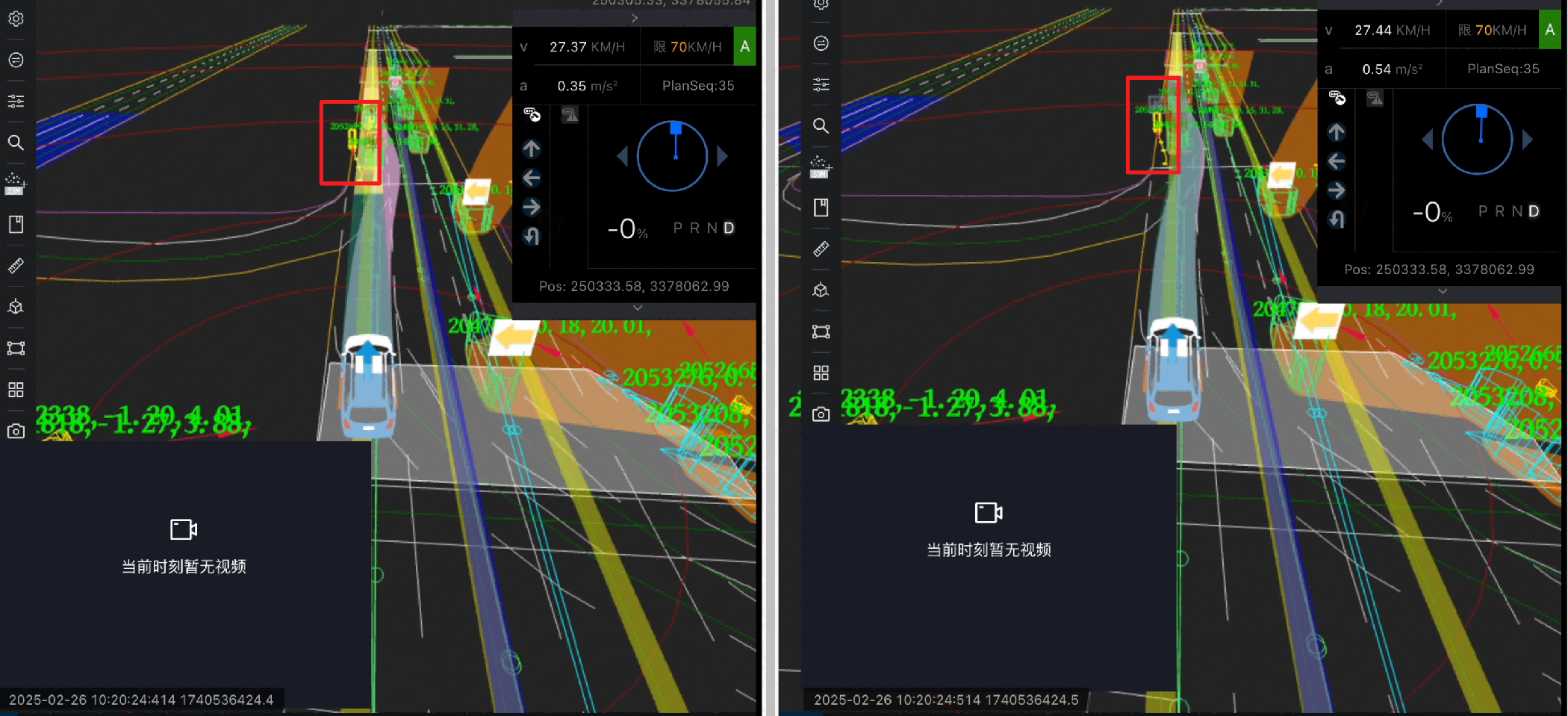
Rule-Based Strategy Optimization for VRUs. Optimized rule-based decision making and planning modules for VRUs. Major contributions include (1) Designed an animal interaction module from scratch, reducing animal-related collisions by more than 50% (Figure.2 c). (2) Incorporated semantic perception signals into planning decisions, including (a) face orientation toward the ego vehicle, (b) crossing intention estimation, (c) temporary disappearance in blind zones. Improved driving efficiency by 5.18% while reducing hard braking events by 9.27% (Figure.2 a-b). (3) Designed and optimized emergency vehicle siren handling strategies, crosswalk courtesy policies for VRUs, proactive speed limiting strategies for potential collision scenarios, and other safety-critical interaction policies.
Sampling-Based Spatio-Temporal Search in S-L-T Space. Designed and implemented a sampling-based spatio-temporal planner for coordinated longitudinal and lateral interaction planning. The framework consists of (1) Critical obstacle and scenario detection. (2) Ego path and speed sampling. (3) Obstacle speed sampling for prediction uncertainty handling. (4) Cost-based evaluation of ego-obstacle trajectory pairs. (5) Joint decision generation (e.g., nudge or yield). The system was primarily deployed for pedestrian interactions, achieving (1) Hard braking reduction: 10.11%, (2) Driving efficiency improvement: 4.16%, (3) Collision-risk score reduction: 52.4% (Figure.2 e-g).
Long-Short Term Contingency Planner in X-Y-T Space. Contributed to the design and implementation of a universal search-based contingency planner for cross-scenario autonomous driving. Major contributions include (1) Vehicle-dynamics-constrained tree expansion. (2) Unified cost design across obstacle types, including safety, comfort, efficiency, compliance, and consistency costs. (3) Multimodal trajectory combination and selection. (4) Multimodal A* acceleration techniques. Results: (1) Improved performance in high-risk scenario sets by 20.3%. (2) Reduced hard braking events in complex urban areas by 57.7%.
(a) Perception Face-toward-ego Signal
|
(b) Perception Non-crossing Signal
|
(c) Animal Interaction
|
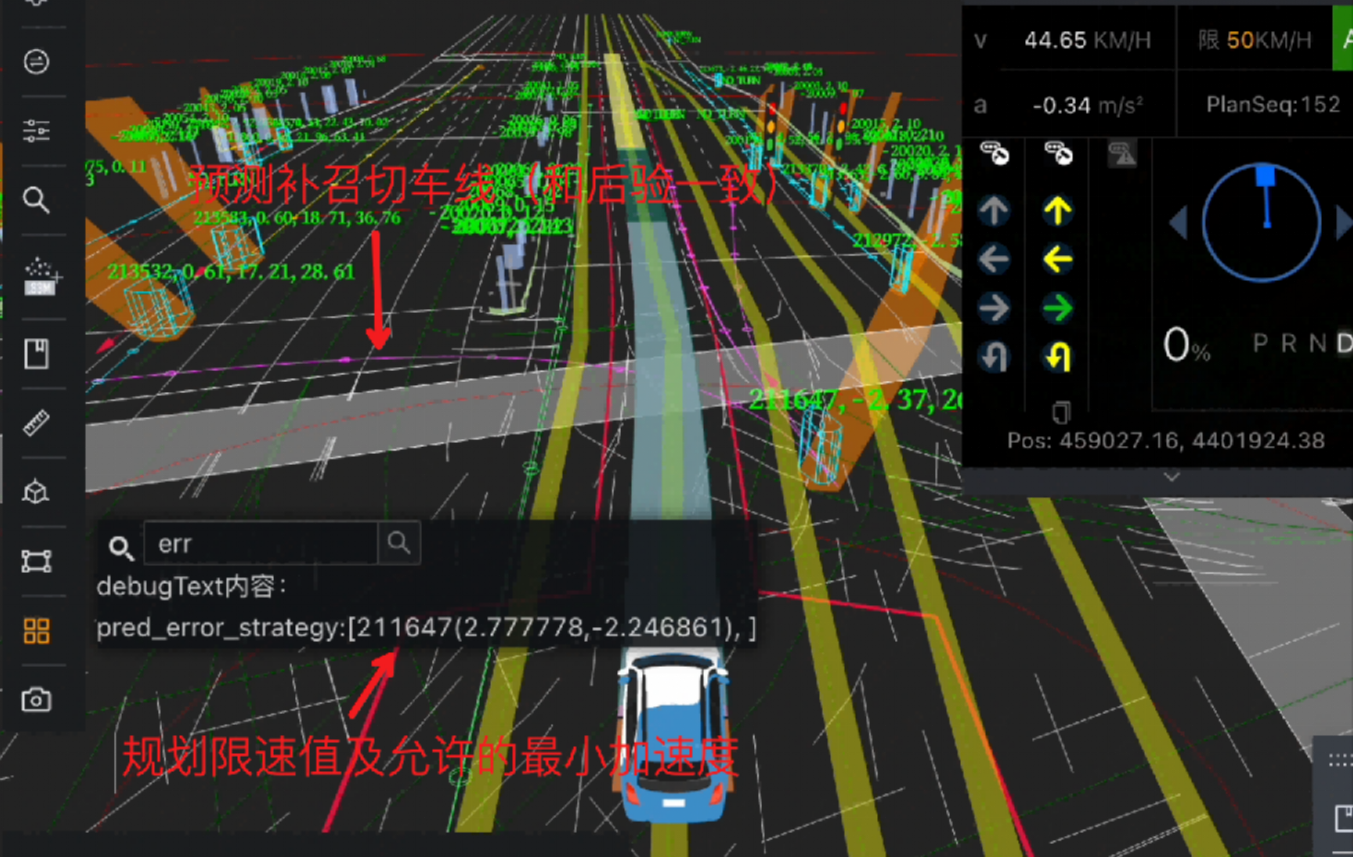
(d) Post-processing of Prediction Model
|
(e) Quantification Results of Spatio-temporal Search
|
(f) Nudge Low-speed VRU
|
(g) Nudge Reverse VRU
|
Figure 2. Some Visualizations of the Work Results(right: the newest version)
Master Thesis: An Efficient Beam Search Algorithm for Active Perception in Mobile Robotics
Qu, K., Wang, H., Klemm, V., Cadena, C., Hutter, M., An Efficient Beam Search Algorithm for Active Perception in Mobile Robotics., The International Journal of Robotics Research (IJRR), 2026.Abstract: Active perception is a fundamental problem in autonomous robotics in which the robot must decide where to move and what to sense in order to obtain the most informative observations for accomplishing its mission. Existing approaches either solve a computationally expensive traveling salesman problem (TSP) over heuristically selected informative nodes, or adopt a more efficient but overly constrained shortest path tree (SPT) formulation. To address these limitations, we explore beam search algorithms as scalable alternatives. While the standard beam search provides scalability by preserving the top-B paths at each depth level, it is prone to local optima and exhibits parameter sensitivity. Our first contribution is a node-wise beam search (NBS) algorithm, which maintains top-B candidates per node to enable more effective exploration of the solution space. Systematic benchmarking on graphs shows that NBS consistently outperforms all baselines and maintains strong performance even at low beam widths. As a second contribution, we integrate the concept of frontiers into the path selection criterion, introducing the expected gain metric, which better balances exploration and exploitation compared to existing alternatives. Our third contribution proposes the rapidly-exploring random annulus graph (RRAG), a novel graph construction method that preserves full orientation sampling and ensures connectivity in cluttered environments through a fallback local sampling-based planner. Extensive experiments demonstrate that NBS combined with RRAG achieves the highest performance across all three representative active perception tasks, outperforming state-of-the-art algorithms by at least 20% in one or more tasks. We further validate the approach on real robotic platforms in different scenarios. Website for more demonstrations
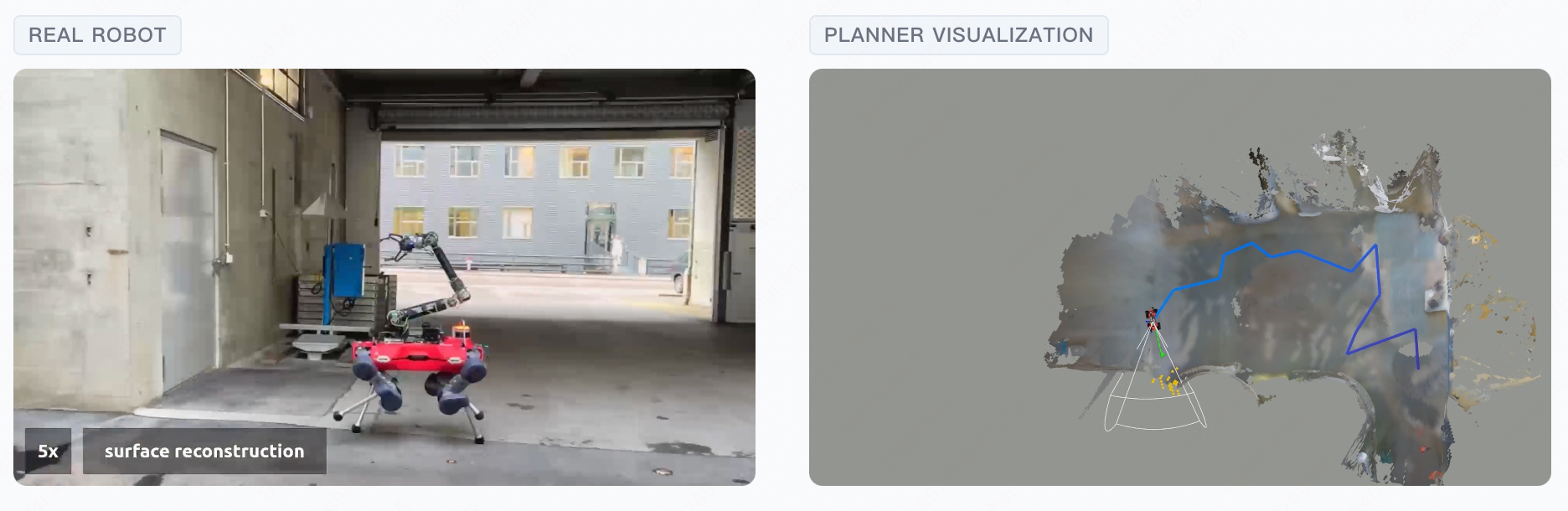
Figure. 3 Real-World Experiments
Decision Making and Motion Planning Research Intern, Qcraft
Description: During the internship, I independently designed and deployed an A*-based motion search algorithm to accelerate the Initializer stage of the autonomous driving planner. The previous search method, based on Dynamic Programming, frequently suffered from high latency and computation timeouts in complex scenarios. To address this limitation, I proposed a new A* search framework inspired by a neural planner to guide the search expansion. I was responsible for the entire development cycle, including proposal design, algorithm derivation, system refactoring, debugging visualization, and benchmarking. The new searcher generates high-quality feasible trajectories in significantly shorter time without sacrificing performance. In large-scale simulations for L4 systems, the passing rate improved by 0.38%, the number of Initializer timeouts was reduced by 77%, and the average computation time on hardware platforms decreased by 34%, after which the module was successfully deployed. To further adapt the method for L2 deployment, I redesigned the heuristic function using reference lines and reference speed tables and introduced caching mechanisms to accelerate repeated searches. While maintaining nearly unchanged performance, the optimized system reduced Initializer timeouts by 96%, lowered its average computation time by 70.42%, and reduced the overall planner latency by 41.59%. In addition, I improved leading group selection and leading cost computation to better handle lane-change interactions, and contributed to internal simulation dashboards and evaluation tools to enhance development efficiency and testing coverage.
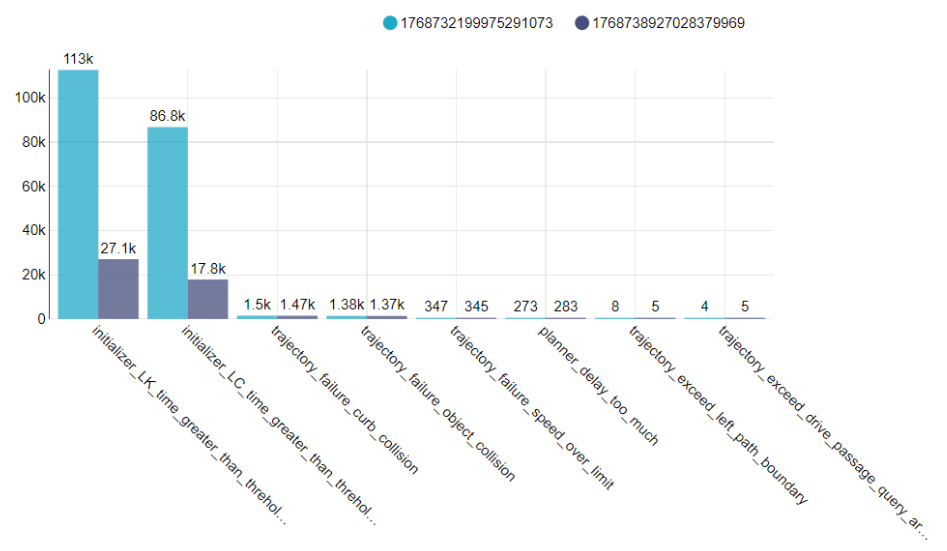
Figure. 4 Improvement on Computation